Type machine à emballer de bouteille de plastique, machine à emballer de grippage de bouteille de l'animal familier 600ml
-
Surligner
Type machine à emballer de grippage en plastique de bouteille
,machine à emballer de bouteille de l'animal familier 600ml
,machine à emballer en plastique de la bouteille 600ml
-
TypeType de grippage
-
Capacité de production600-2000 boîtes / heure
-
Caractéristiques mécaniques7500*1750*2500 (bande de conveyeur y compris)
-
PuissanceAC / triphasé / 50Hz / 380V, 5,5Kw
-
Consommation d'air0.6Mpa≤pressure≤0.8Mpa; 1200L / Min
-
Poids de machineau sujet de 1500kg
-
Lieu d'origineJiangsu, Chine
-
Nom de marqueSUNRISE
-
CertificationEcoVadis audit, UL certification, SGS certification, Sedex certification, European Union PED, American ASME, German TUV, Russian GOST, European Union ATEX, Australia AS1210, CE, ISO
-
Numéro de modèleKYXLGCP
-
Quantité de commande min1
-
PrixNegotiable
-
Détails d'emballageEmballage de expédition standard de boîte en bois ou de film de bout droit
-
Délai de livraison120 jours
-
Conditions de paiementL/C, D/A, D/P, T/T, Western Union, MoneyGram
-
Capacité d'approvisionnement6 unités par an
Type machine à emballer de bouteille de plastique, machine à emballer de grippage de bouteille de l'animal familier 600ml



Type machine à emballer de grippage de KYXLGCP
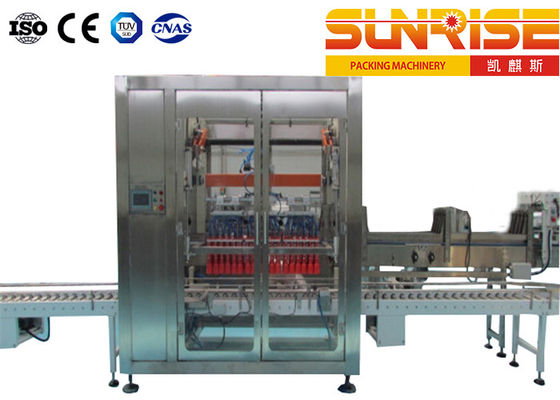
Lancement de produit :
Cet équipement est une machine à emballer conçue et produite par notre société avec l'opération pneumatique + électrique. Ses avantages sont structure compacte, bel aspect, consommation basse d'énergie, opération stable et opération commode. Le dispositif d'entraînement est un double bras de balancier symétrique, conduit par un moteur servo japonais de MITSUBISHI ou un moteur asynchrone triphasé, et il fonctionne sans à-coup.
Propriétés de produit :
| Type : | Type de grippage |
| Numéro de type : | KYXLGCP-02/03/04/05GD, KYXLGCP-02/03/04/05GDS |
| Bouteille : | bouteille de l'ANIMAL FAMILIER 600ml, échantillon de référence spécifique |
| Boîte : | Boîte ondulée formée |
| Disposition de bouteille : | selon la méthode de empaquetage |
| Nombre de groupes d'agrippeur : | 2 groupes de groups/3 groups/4 groups/5 |
| Capacité de production : | 600-2000 boîtes/heure |
| Disposition de bouteille : | Deux rangées selon le produit conditionné, trois rangées sont réglables |
| Caractéristiques mécaniques : | (length×width×height millimètre) : 7500*1750*2500 (bande de conveyeur y compris) |
| Puissance : | AC/3phase/50Hz/380V, 5.5Kw |
| Consommation d'air : | 0.6Mpa≤pressure≤0.8Mpa ; 1200L/Min |
| Poids de machine : | au sujet de 1500KG |
![]()
![]()
![]()
Aperçu :
(1) agrippeur de bouteille
Selon les différentes caractéristiques d'aspect du produit, le mécanisme de saisie de bouteille, deux ensembles d'ensembles d'agrippeur de bouteille, chaque spécifications
Le produit emploie le mécanisme de saisie correspondant de bouteille pour saisir la bouteille. Le groupe d'agrippeur de bouteille adopte un type tête d'airbag de grippage de bouteille, qui n'endommage pas la bouteille.
(2) mécanisme de levage de groupe de saisie de bouteille
Le groupe de saisie de bouteille est conduit par un bras de balancier bi-directionnel symétrique, c.-à-d., le bras de balancier fonctionne dans la voie conçue d'arc pour saisir la bouteille et
Action de machine à emballer. Le mécanisme de conception est compact, l'action est précise, et l'opération est stable.
(3) les bouteilles entrent dans la bande de conveyeur d'entreposage en bouteille sur la machine à emballer par la bande de conveyeur de allaiter au biberon, et le séparateur automatique de bouteille transportera les bouteilles dans une rangée simple.
Le sous-marin est automatiquement divisé en 3 colonnes selon les conditions de conception, et la disposition est ajustée sur une position appropriée
(4) le déflecteur fixe la boîte dans la position correcte en tournant le cylindre, évitant effectivement l'occurrence de la fuite de réservoir ou de la rupture de boîte.
(5) la boîte est stationnaire en emballant, et la boîte est fournie en même temps quand la boîte est chargée, qui maximise l'efficacité de travail
(6) le moteur d'entraînement adopte un moteur variable de fréquence de l'entreprise mixte Sino-USA, qui est commandé par un convertisseur de fréquence
(7) séparateur automatique de bouteille
Commandé par un moteur de vitesse-réglementation micro, les bouteilles fournies sont automatiquement divisées en quatre canaux pour l'approvisionnement, effectivement évitant des blocages de bouteille et le serrage de bouteille.
L'occurrence du phénomène garantit effectivement l'efficacité de travail de la machine à emballer.
(8) bande de conveyeur de bouteille/boîte
La bande de conveyeur est conduite par un moteur asynchrone, et est commandée par un convertisseur de fréquence et un contacteur selon les différents besoins de transport.
Allaiter au biberon automatique et décharger, alimenter et déballer automatique, etc.
(9) groupe de grippage de bouteille :
Il se compose de deux groupes d'agrippeurs de bouteille, chaque groupe peut saisir 15 bouteilles en même temps, et les deux groupes d'agrippeurs de bouteille sont conduits par un cylindre pour séparer l'espacement
(10) dispositif de sécurité
L'équipement est équipé des portes de sécurité et de divers dispositifs de protection et de détection de sécurité pour assurer effectivement la sécurité des opérateurs.
(11) l'opération ouverte d'écran tactile est adoptée, qui est plus sûre et plus simple. Divers codes de défaut intégrés et solutions de défaut. Quand un défaut se produit, l'interface homme-machine montrera l'emplacement du défaut, aussi bien que la cause et la solution du défaut, afin d'améliorer l'efficacité de travail du personnel d'entretien. L'interface intégrée de modification de divers paramètres d'emploi d'éventualité peut être modifiée à temps selon les conditions de l'opérateur d'améliorer l'efficacité de travail de l'équipement.
Nos services couvrent toutes les industries et atteignent toutes les régions du monde.